|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
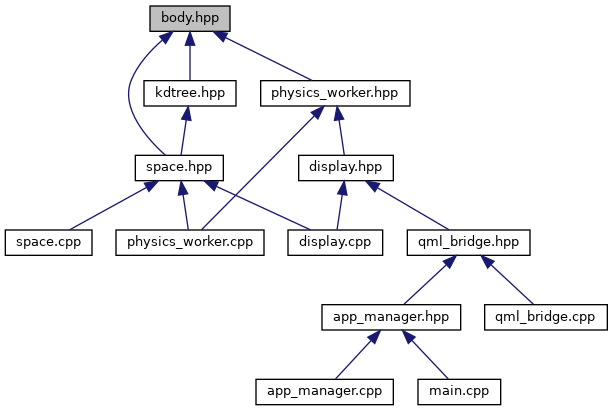
SoA container for simulation bodies and proxies for AoS-like access. More...
#include <cassert>#include <Eigen/Dense>#include <Eigen/Geometry>#include <vector>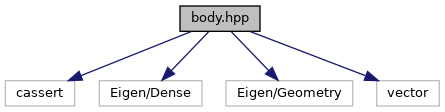
Go to the source code of this file.
Classes | |
| class | Model::BodyProxyBase< T > |
| A template base class for body proxies to reduce code duplication. More... | |
| class | Model::BodyProxy |
A proxy object that provides an AoS-like interface to a body stored in the Bodies SoA container. More... | |
| class | Model::ConstBodyProxy |
A const proxy object that provides a read-only AoS-like interface to a body stored in the Bodies SoA container. More... | |
| class | Model::Bodies |
| Structure-of-Arrays (SoA) container for all bodies in the simulation. More... | |
Typedefs | |
| using | Model::Vector3dVec = std::vector< Eigen::Vector3d, Eigen::aligned_allocator< Eigen::Vector3d > > |
| using | Model::QuaterniondVec = std::vector< Eigen::Quaterniond, Eigen::aligned_allocator< Eigen::Quaterniond > > |
SoA container for simulation bodies and proxies for AoS-like access.
This file is part of the pure C++ benchmark.
Definition in file body.hpp.
| using Model::QuaterniondVec = typedef std::vector<Eigen::Quaterniond, Eigen::aligned_allocator<Eigen::Quaterniond> > |