|
| | BodyProxyBase (T &in_bodies, std::size_t in_index) |
| | Construct a new Body Proxy Base object. More...
|
| |
| double | m () const noexcept |
| | Access to body masses. More...
|
| |
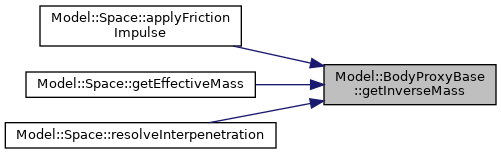
| double | getInverseMass () const |
| | Access to the inverse of the body masses. More...
|
| |
| double | r () const noexcept |
| | Access to body radii. More...
|
| |
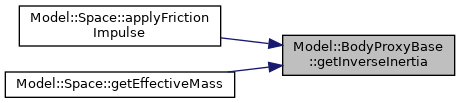
| double | getInverseInertia () const |
| | Access to the inverse of the body's moment of inertia. More...
|
| |
| const Vector3d & | x () const noexcept |
| | Access to body positions. More...
|
| |
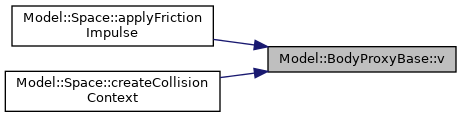
| const Vector3d & | v () const noexcept |
| | Access to body velocities. More...
|
| |
| const Quaterniond & | q () const noexcept |
| | Access to body orientation. More...
|
| |
| const Vector3d & | omega () const noexcept |
| | Access to body angular velocities. More...
|
| |
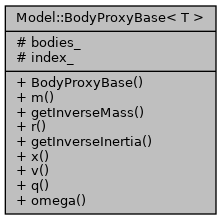
template<typename T>
class Model::BodyProxyBase< T >
A template base class for body proxies to reduce code duplication.
- Template Parameters
-
Definition at line 43 of file body.hpp.