|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
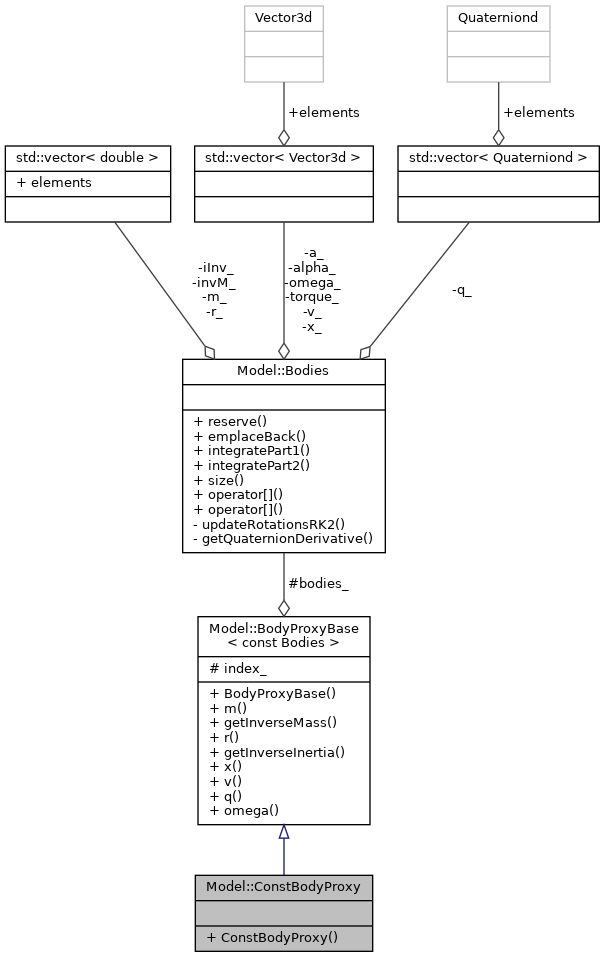
A const proxy object that provides a read-only AoS-like interface to a body stored in the Bodies SoA container.
More...
#include <body.hpp>
Public Member Functions | |
| ConstBodyProxy (const Bodies &in_bodies, std::size_t in_index) | |
| Construct a new Const Body Proxy object. More... | |
 Public Member Functions inherited from Model::BodyProxyBase< const Bodies > Public Member Functions inherited from Model::BodyProxyBase< const Bodies > | |
| BodyProxyBase (const Bodies &in_bodies, std::size_t in_index) | |
| Construct a new Body Proxy Base object. More... | |
| double | m () const noexcept |
| Access to body masses. More... | |
| double | getInverseMass () const |
| Access to the inverse of the body masses. More... | |
| double | r () const noexcept |
| Access to body radii. More... | |
| double | getInverseInertia () const |
| Access to the inverse of the body's moment of inertia. More... | |
| const Vector3d & | x () const noexcept |
| Access to body positions. More... | |
| const Vector3d & | v () const noexcept |
| Access to body velocities. More... | |
| const Quaterniond & | q () const noexcept |
| Access to body orientation. More... | |
| const Vector3d & | omega () const noexcept |
| Access to body angular velocities. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from Model::BodyProxyBase< const Bodies > | |
| const Bodies & | bodies_ |
| Reference to the main SoA container. More... | |
| std::size_t | index_ |
| The index of the body this proxy refers to. More... | |
A const proxy object that provides a read-only AoS-like interface to a body stored in the Bodies SoA container.
|
inline |