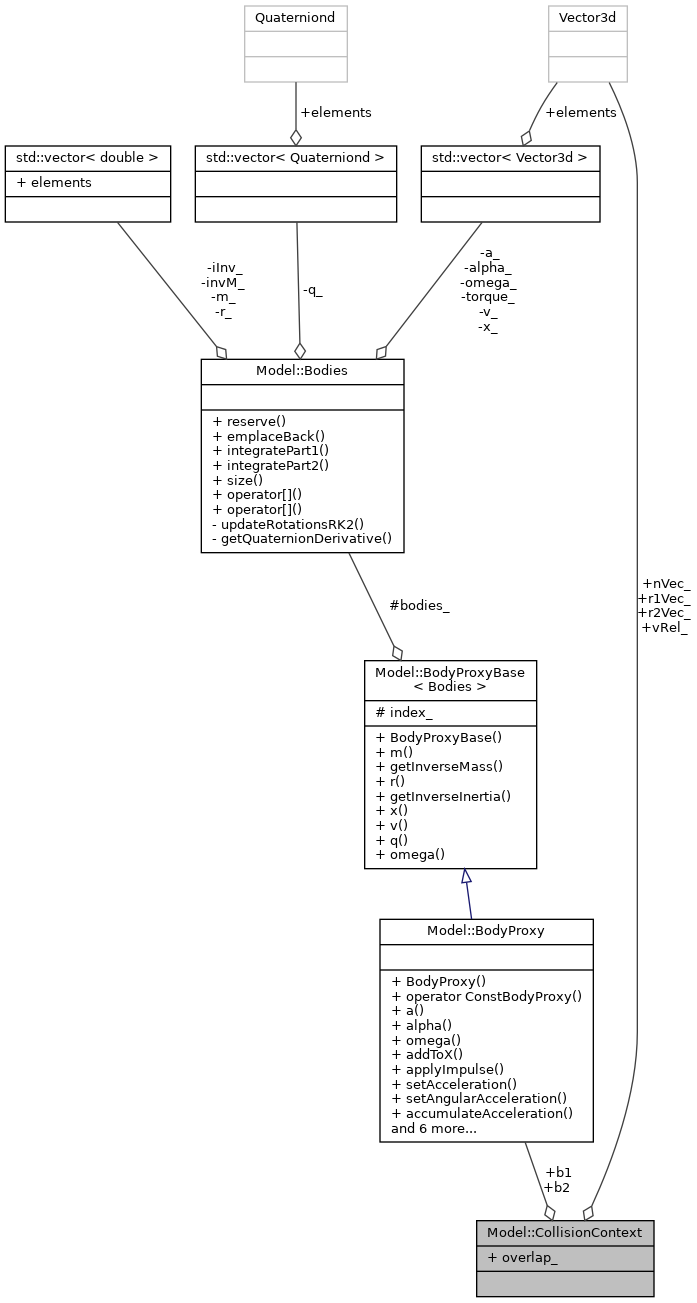
A data container to hold all relevant information for a single collision event.
More...
#include <space.hpp>
|
| BodyProxy & | b1 |
| | A proxy to the first body in the collision. More...
|
| |
| BodyProxy & | b2 |
| | A proxy to the second body in the collision. More...
|
| |
| Vector3d | nVec_ |
| | The normalised vector pointing from body 1 to body 2. More...
|
| |
| Vector3d | r1Vec_ |
| | The vector from the centre of body 1 to the contact point. More...
|
| |
| Vector3d | r2Vec_ |
| | The vector from the centre of body 2 to the contact point. More...
|
| |
| Vector3d | vRel_ |
| | The relative velocity between the two bodies at the contact point. More...
|
| |
| double | overlap_ |
| | The penetration depth of the two bodies. More...
|
| |
A data container to hold all relevant information for a single collision event.
Definition at line 67 of file space.hpp.
◆ b1
A proxy to the first body in the collision.
Definition at line 69 of file space.hpp.
◆ b2
A proxy to the second body in the collision.
Definition at line 71 of file space.hpp.
◆ nVec_
| Vector3d Model::CollisionContext::nVec_ |
The normalised vector pointing from body 1 to body 2.
Definition at line 73 of file space.hpp.
◆ overlap_
| double Model::CollisionContext::overlap_ |
The penetration depth of the two bodies.
Definition at line 82 of file space.hpp.
◆ r1Vec_
| Vector3d Model::CollisionContext::r1Vec_ |
The vector from the centre of body 1 to the contact point.
Definition at line 75 of file space.hpp.
◆ r2Vec_
| Vector3d Model::CollisionContext::r2Vec_ |
The vector from the centre of body 2 to the contact point.
Definition at line 77 of file space.hpp.
◆ vRel_
| Vector3d Model::CollisionContext::vRel_ |
The relative velocity between the two bodies at the contact point.
Definition at line 80 of file space.hpp.
The documentation for this struct was generated from the following file: