|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
|
pure-cpp 1.0.0
A C++ physics simulation benchmark comparing performance with Python implementations
|
Constants for the model. More...
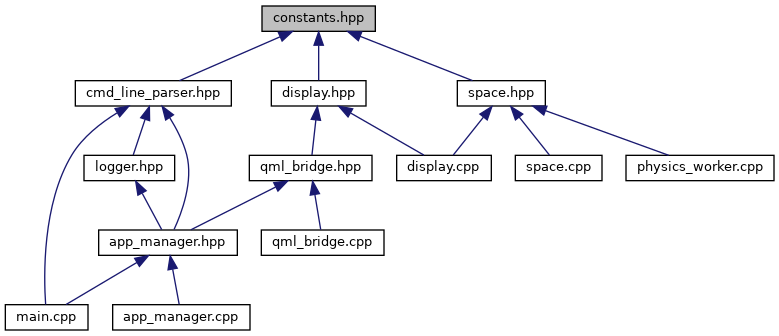
Go to the source code of this file.
Variables | |
| constexpr double | Model::EPSILON = 1e-6 |
| Default computing precision value. More... | |
| constexpr double | Model::G = 6.67430e-11 |
| Default universal gravitational constant (in m³⋅kg⁻¹⋅s⁻²). More... | |
| constexpr double | Model::TARGET_DX = 0.01 |
| Heuristic for the maximum distance a body should travel in one step, used for adaptive time stepping. More... | |
| constexpr double | Model::MAX_DT = 0.01 |
| Maximum time step allowed for the simulation to ensure stability. More... | |
| constexpr double | Model::COEFF_RESTITUTION = 0.1 |
| Coefficient of restitution for collisions (e.g., 0.8 for a very bouncy ball). More... | |
| constexpr double | Model::COEFF_STATIC_FRICTION = 0.8 |
| Coefficient of static friction. More... | |
| constexpr double | Model::COEFF_FRICTION = 0.6 |
| Coefficient of kinetic (sliding) friction, also known as dynamic friction. More... | |
| constexpr double | Model::DT_DAMPING_FACTOR = 0.1 |
| Damping factor for smoothing adaptive time step changes. More... | |
| constexpr double | Model::POSITIONAL_CORRECTION_FACTOR = 0.2 |
| The percentage of overlap to correct per frame (Baumgarte stabilisation). More... | |
| constexpr double | Model::LINEAR_DAMPING = 0.005 |
| Damping factor for linear velocity. More... | |
| constexpr double | Model::ANGULAR_DAMPING = 0.005 |
| Damping factor for angular velocity. More... | |
| constexpr int | Model::DEFAULT_LOG_FREQ = 100 |
| Default frequency for logging system energy. More... | |
| constexpr double | Model::MIN_BODY_MASS = 25.0 |
| Minimum mass for randomly generated bodies. More... | |
| constexpr double | Model::MAX_BODY_MASS = 75.0 |
| Maximum mass for randomly generated bodies. More... | |
| constexpr double | Model::MIN_INITIAL_VELOCITY = -5.0 |
| Minimum initial velocity component for randomly generated bodies. More... | |
| constexpr double | Model::MAX_INITIAL_VELOCITY = 5.0 |
| Maximum initial velocity component for randomly generated bodies. More... | |
| constexpr double | Model::MAX_INITIAL_ANGULAR_VELOCITY = 0.5 |
| Maximum initial angular velocity component for randomly generated bodies (in rad/s). More... | |
| constexpr double | Model::PLACEMENT_SCALE_FACTOR = 4.0 |
| Heuristic scaling factor for the initial placement volume of bodies. More... | |
| constexpr int | Model::SETTLING_STEPS = 5 |
| The number of "settling" steps to run at the start of the simulation. More... | |
| constexpr double | Model::TORQUE_ARROW_SCALE = 0.1 |
| Scaling factor for the length of the torque visualization arrow. More... | |
| constexpr double | Model::ALPHA_ARROW_SCALE = 1.0 |
| Scaling factor for the length of the angular acceleration arrow. More... | |
Constants for the model.
This file is part of the pure C++ benchmark.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see https://www.gnu.org/licenses/.
Definition in file constants.hpp.
|
constexpr |
Scaling factor for the length of the angular acceleration arrow.
Definition at line 101 of file constants.hpp.
|
constexpr |
Damping factor for angular velocity.
Definition at line 66 of file constants.hpp.
|
constexpr |
Coefficient of kinetic (sliding) friction, also known as dynamic friction.
Definition at line 53 of file constants.hpp.
|
constexpr |
Coefficient of restitution for collisions (e.g., 0.8 for a very bouncy ball).
Definition at line 46 of file constants.hpp.
|
constexpr |
Coefficient of static friction.
Definition at line 49 of file constants.hpp.
|
constexpr |
Default frequency for logging system energy.
Definition at line 69 of file constants.hpp.
|
constexpr |
Damping factor for smoothing adaptive time step changes.
Definition at line 56 of file constants.hpp.
|
constexpr |
Default computing precision value.
Definition at line 32 of file constants.hpp.
|
constexpr |
Default universal gravitational constant (in m³⋅kg⁻¹⋅s⁻²).
Definition at line 35 of file constants.hpp.
|
constexpr |
Damping factor for linear velocity.
Definition at line 63 of file constants.hpp.
|
constexpr |
Maximum mass for randomly generated bodies.
Definition at line 76 of file constants.hpp.
|
constexpr |
Maximum time step allowed for the simulation to ensure stability.
Definition at line 42 of file constants.hpp.
|
constexpr |
Maximum initial angular velocity component for randomly generated bodies (in rad/s).
Definition at line 86 of file constants.hpp.
|
constexpr |
Maximum initial velocity component for randomly generated bodies.
Definition at line 82 of file constants.hpp.
|
constexpr |
Minimum mass for randomly generated bodies.
Definition at line 73 of file constants.hpp.
|
constexpr |
Minimum initial velocity component for randomly generated bodies.
Definition at line 79 of file constants.hpp.
|
constexpr |
Heuristic scaling factor for the initial placement volume of bodies.
Definition at line 90 of file constants.hpp.
|
constexpr |
The percentage of overlap to correct per frame (Baumgarte stabilisation).
Definition at line 60 of file constants.hpp.
|
constexpr |
The number of "settling" steps to run at the start of the simulation.
Definition at line 94 of file constants.hpp.
|
constexpr |
Heuristic for the maximum distance a body should travel in one step, used for adaptive time stepping.
Definition at line 39 of file constants.hpp.
|
constexpr |
Scaling factor for the length of the torque visualization arrow.
Definition at line 98 of file constants.hpp.